Повышение энергоэффективности промышленных предприятий является одной из ключевых задач современной экономики. Одним из перспективных подходов к её решению является внедрение систем предиктивного управления, которые позволяют оптимизировать энергопотребление технологических установок на основе математических моделей и алгоритмов искусственного интеллекта. Однако эффективность таких систем напрямую зависит от точности и адекватности используемой модели объекта управления, получение которой невозможно без проведения натурных экспериментов и грамотной обработки реальных данных. Данная работа выполнена в рамках проекта «Предиктивное управление энергопотреблением на базе ПЛК и ИИ в отечественной среде разработки ALTA IDE» всероссийского конкурса «Сириус.Лето». Практической целью настоящего этапа проекта стала экспериментальная идентификация динамической модели простого технологического объекта, описываемого апериодическим звеном, для последующей интеграции в контур интеллектуального управления. Эксперименты проводились на лабораторном стенде с использованием отечественного программно-аппаратного комплекса. Управление объектом и сбор данных осуществлялись через программируемый логический контроллер ПЛК-210 компании «Овен», программируемый в среде ALTA IDE. Объектом исследования выступал канал «перемещение регулирующего органа — расход питательной воды».
Таблица 1
Перемещение РО в экспериментах
|
1 |
2 |
3 |
4 |
5 | |
|
Начальное положение [%] |
50 |
65 |
20 |
50 |
65 |
|
Конечное положение [%] |
65 |
50 |
50 |
70 |
80 |
В ходе серии из пяти экспериментов фиксировалась реакция расхода (номинальное значение 125 т/ч, максимальное 250 т/ч) на ступенчатое изменение положения РО. Первичный анализ заключался в визуализации всех «сырых» экспериментальных данных на одном графике, что позволило оценить разброс и наличие помех.
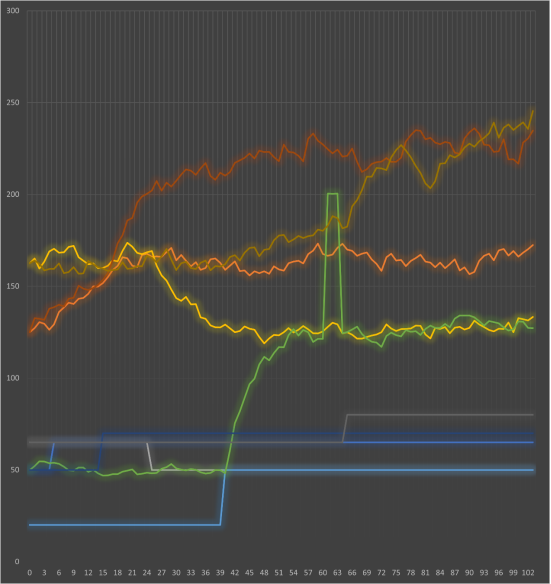
Рис. 1. Сырые экспериментальные данные
Для последующего анализа и сравнения с теоретической моделью данные были подвергнуты процедуре нормировки. Положение РО и значение расхода были приведены к безразмерному виду в диапазоне от 0 до 1. Для этого все значения положения РО были пересчитаны относительно их диапазона изменения, а значения расхода — поделены на максимальную величину (250 т/ч). Кроме того, для преобразования кривых разгона в стандартные переходные характеристики (реакцию на единичное ступенчатое воздействие) показания расхода были отнесены к величине приложенного возмущения (разнице между конечным и начальным положением РО в каждом опыте). Особенностью второго эксперимента было отрицательное возмущение (снижение положения РО). Для удобства сравнения с другими опытами данная кривая была развернута умножением на -1, что позволило работать с однонаправленными переходными процессами.
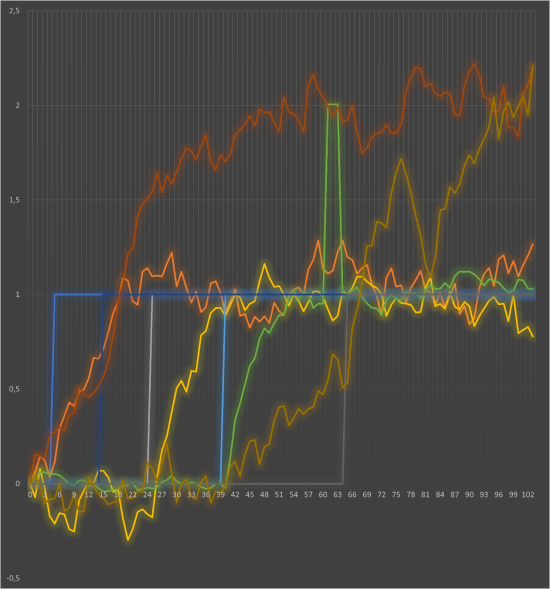
Рис. 2. Нормировка
Для корректного сравнительного анализа и последующего усреднения данные всех экспериментов были синхронизированы по времени. Момент подачи ступенчатого воздействия (изменения положения РО) для каждой кривой был принят за новый нулевой момент времени. Таким образом, все переходные процессы на графике начинаются из одной точки, что позволяет наглядно сопоставлять их динамику, форму и установившиеся значения независимо от реального хронологического порядка проведения опытов. Данная процедура является стандартным этапом подготовки экспериментальных данных при идентификации динамических объектов.
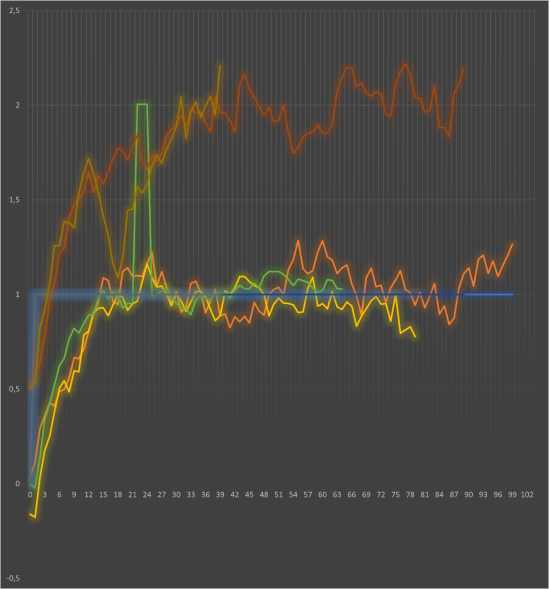
Рис. 3. Синхронизация переходных процессов по времени
Для обеспечения достоверности результатов был проведен критический анализ качества всех пяти полученных кривых разгона на предмет их пригодности для идентификации модели. В результате два эксперимента были исключены из дальнейшего рассмотрения. В первом из них наблюдался значительный дрейф измеряемой величины еще до момента приложения тестового ступенчатого воздействия, что указывало на нестационарное состояние объекта и нарушало базовое условие проведения эксперимента. Второй эксперимент был отбракован, поскольку его динамические характеристики качественно отличались от остальных данных даже в «сыром» виде.
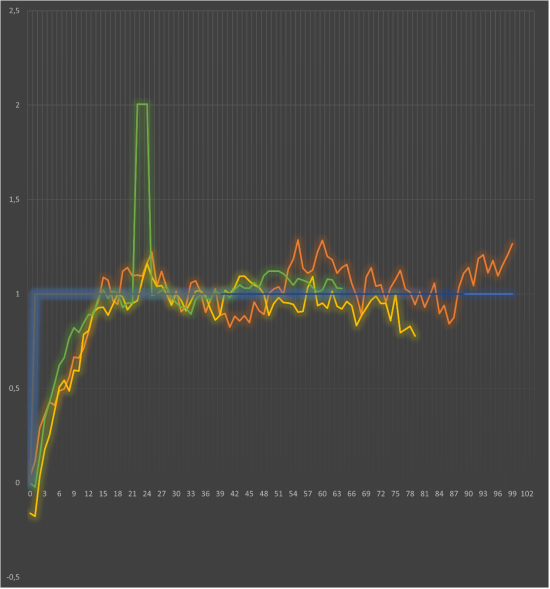
Рис. 4. Оставшиеся три эксперимента
Консультация с персоналом, обслуживающим установку, подтвердила гипотезу о том, что эти данные были ошибочно получены с другого технологического канала и были предоставлены в том числе для проверки корректности методики валидации экспериментальных данных. После исключения этих опытов для анализа остались три кривые, соответствующие одному и тому же объекту.
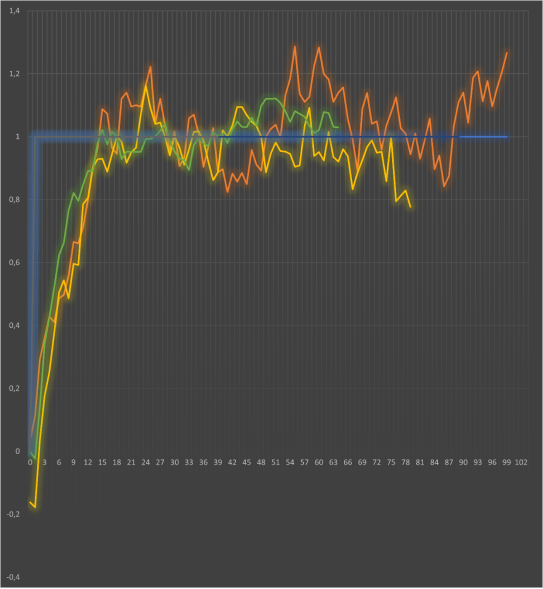
Рис. 5. Устранили выброс в третьем эксперименте
В одном из трех выбранных экспериментов были зафиксированы три аномальных выброса значений. Для сохранения целостности переходного процесса данные в этих точках были скорректированы с помощью линейной интерполяции между соседними достоверными отсчетами. Таким образом, итоговая выборка для построения модели была сформирована на основе трех проверенных и очищенных переходных характеристик. Полученный набор обработанных переходных характеристик служит основой для следующего этапа работы: расчёта передаточных функций, анализа динамических параметров и, что наиболее важно, сравнения результатов, полученных из «зашумлённых» реальных данных, с параметрами эталонной модели объекта.
Качественный анализ очищенных и нормированных переходных характеристик показал, что их форма соответствует реакции стандартного динамического звена —
апериодического звена первого порядка
. Его математическая модель описывается дифференциальным уравнением, а в терминах передаточной функции характеризуется двумя параметрами:
коэффициентом усиления


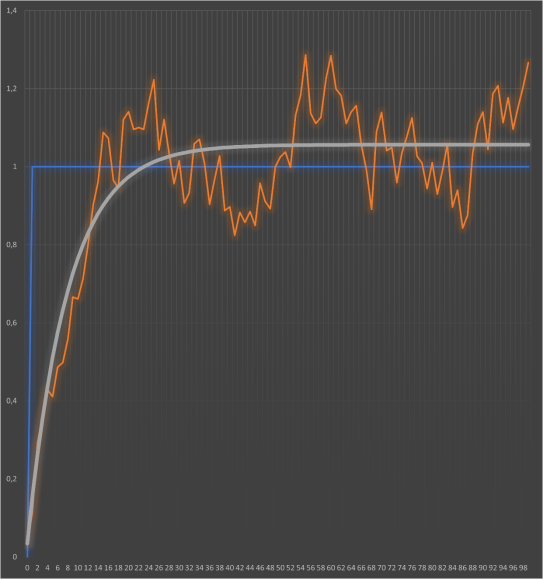
Рис. 6. Опыт 1, модель и данные
Полученные оценки параметров для всех трех экспериментов показали хорошую сходимость, что свидетельствует о воспроизводимости результатов и корректности выбранной структуры модели.
Таблица 2
Результаты
|
1 |
2 |
3 |
Итог | |
|
Коэффициент усиления |
1,056570286 |
0,974365548 |
1,03474456 |
1 |
|
Постоянная времени |
8,471269302 |
7,340155878 |
7,255986788 |
8 |
Учет неизбежного присутствия шумов в реальных измерениях позволил сделать итоговое, наиболее вероятное заключение о параметрах идентифицированного объекта:
-
Коэффициент усиления

-
Постоянная времени

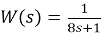
Таким образом, на основе обработанных экспериментальных данных была получена передаточная функция объекта управления для канала «положение РО — расход»:
Вывод и дальнейшие планы
Проведенная работа подтвердила возможность идентификации динамических моделей технологических объектов на основе данных, полученных с помощью отечественного комплекса (ПЛК Овен и ALTA IDE), и их последующей обработки доступными средствами. Полученная модель является ключевым элементом для синтеза системы управления. На следующем этапе проекта планируется реализовать в среде ALTA IDE типовой ПИД-регулятор, настроить его параметры на основе известной модели объекта (K=1, T=8c) и провести серию испытаний. Сравнение переходных процессов в системе с рассчитанным регулятором и экспериментальных кривых разгона позволит окончательно верифицировать качество и пригодность идентифицированной модели для решения задачи предиктивного управления энергопотреблением.
Литература:
1. Андрюшин, А. В. Управление и инноватика в теплоэнергетике: учебное пособие / А. В. Андрюшин, В. Р. Сабанин, Н. И. Смирнов. — Москва: МЭИ, 2016. — 392 с. — ISBN 978–5–383–01037–2.

