Пылевые бури Красной планеты представляют существенную угрозу для работы исследовательских аппаратов, оборудованных солнечными панелями для производства электроэнергии. В статье представлены результаты разработки аппаратно-программного комплекса на базе микрокомпьютера и широкоугольной оптико-электронной камеры для решения задачи обнаружения пылевой бури в атмосфере Марса с целью заблаговременного планирования работы марсоходов. Проведены экспериментальные исследования разработанного комплекса в земных условиях при решении задачи определения скорости перемещения облаков.
Ключевые слова: пылевые бури на Марсе, солнечные панели исследовательского аппарата, широкоугольная оптико-электронная система.
Марс полон научных загадок, которые привлекают ученых всего мира. Человечество давно грезит о покорении Красной планеты. Однако до того момента, когда нога человека ступит на поверхность Марса, все еще далеко. Отсутствие магнитного поля, сильно разреженная атмосфера и значительные перепады температуры в течение суток не позволят длительное время находиться будущим исследователям на марсианских ландшафтах. Тем не менее, уже значительное число автономных роботов сегодня ведут работу по изучению условий существования и поиску жизни на Марсе.
Марс регулярно подвергается воздействию пылевых бурь, которые охватывают области различных размеров — от небольших участков до масштабов планеты. Бури могут длиться продолжительное время и представляют существенную опасность для исследовательских аппаратов, действующих в настоящее время на поверхности Марса.
С усилением песчаной бури в атмосферу поднимается всё больше пыли, которая мешает свету достигать поверхности планеты. Так, из-за пылевой бури 25 июля 2007 года Солнце почти перестало освещать солнечные батареи марсоходов Спирит и Оппортьюнити [1]. Это приводит к уменьшению вырабатываемой солнечными панелями энергии, и в случае образования глобальных пылевых бурь оборудование переходит в режим ожидания на несколько недель, чтобы переждать густую пылевую завесу.
Исследованием причин возникновения, а также разработкой методик прогнозирования развития пылевых бурь занимаются крупные коллективы ученых по всему миру, получая исходные данные с наземных комплексов наблюдения, орбитальных научных станций, а также непосредственно с марсоходов, функционирующих на поверхности Красной планеты [2–5].
В статье представлены результаты выполнения научно-инженерного проекта. Для решения задачи заблаговременного обнаружения и предупреждения о приближении пылевой бури был разработан аппаратно-программный комплекс на основе микрокомпьютера Raspberry Pi 5 [6] и подключенной к нему широкоугольной камеры, направленной в зенит. Поскольку проведение исследований в естественной среде Марса не представляется возможным, для реализации натурного эксперимента в работе используются аналогичные процессы в земной атмосфере. В качестве аналога приближающейся пылевой бури в работе исследуется движение облачности по небосводу при невысоком общем уровне балльности.
Для определения параметров облачности в работе предлагается схема получения и обработки изображений небесной полусферы, представленная на рис. 1. Облака перемещаются с равномерной скоростью v на высоте H относительно камеры, расположенной на корпусе исследовательского аппарата, который, в свою очередь, находится на земной поверхности, и в момент t i находится на удалении L i от центра камеры. При этом направление на верхнюю видимую границу облачности характеризуется углом α i . В следующий момент времени t i+1 удаление облаков от центра камеры составляет L i+1 , при этом направление на верхнюю видимую границу облачности составляет величину α i+1 . Период времени между измерениями составляет Δ t .
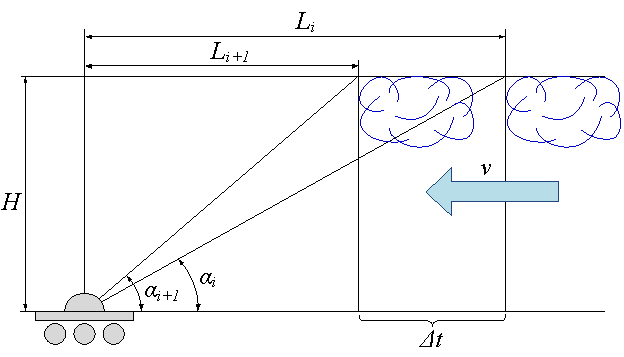
Рис. 1. Схема определения параметров облачности в земной атмосфере
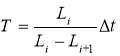
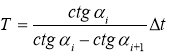
Для того чтобы рассчитать время прибытия облаков в точку расположения камеры, зная только углы направления на верхнюю видимую границу облачности и моменты времени измерений, установим математическую зависимость между угловыми параметрами движения облачности и временем изменений. За время Δ t расстояние от камеры до облаков изменится на величину L i — L i+1 . Тогда искомое время прибытия облаков T будет равно произведению временного периода Δ t на количество отрезков L i — L i+1 , умещающихся в L i :
|
|
(1) |
Разделим числитель и знаменатель получившейся дроби на высоту верхней видимой границы облачности H . Получим:
|
|
(2) |
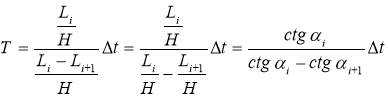
Таким образом, при помощи формулы (2) определяется зависимость между угловыми параметрами движения облачности и временем прибытия облаков в точку расположения камеры.
Изменение положение облачности будет фиксироваться при помощи матрицы оптико-электронного устройства с объективом типа «рыбий глаз», поэтому далее необходимо установить взаимосвязь между угловыми параметрами движения облаков и изменениями пиксельных координат верхней видимой границы облачности. Схематично отображение перемещения облаков по небесной полусфере на приемной матрице оптико-электронного устройства показано на рис. 2.
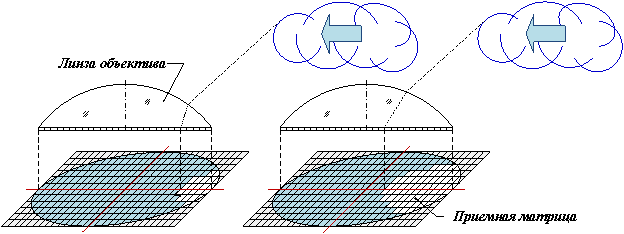
Рис. 2. Изменение пиксельных координат верхней видимой границы облачности
Для того чтобы установить взаимосвязь между угловыми параметрами движения облачности и изменениями пиксельных координат, был проведен эксперимент. Для проведения эксперимента разработана лабораторная установка, включающая микрокомпьютер Raspberry Pi с подключенной широкоугольной оптико-электронной системой, транспортир для определения угла направления на верхнюю видимую границу облачности, а также нить, прикрепленную к основанию камеры.
В ходе проведения эксперимента устанавливались различные углы направления на верхнюю видимую границу облачности в диапазоне от 0° до 90° с интервалом 5°. При этом каждый раз фиксировалось количество пикселей от центра кадра до изображения верхней видимой границы облачности, определяемое по координатам курсора, считываемым программно по изображению на мониторе. Результаты эксперимента представлены в виде графика и аппроксимирующей линии, построенной по полученным данным (рис. 3).
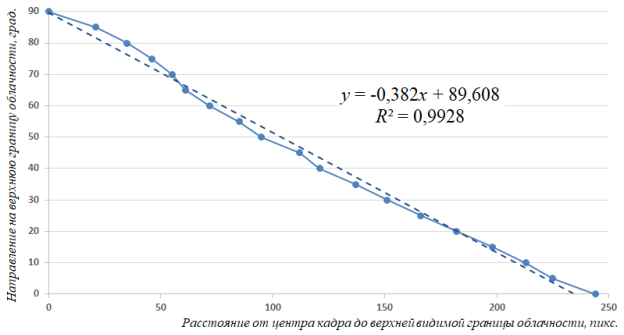
Рис. 3. График соответствия изменений пиксельных координат и угловых параметров движения облачности
По графику на рис. 3 прослеживается линейная зависимость между угловыми параметрами движения облачности и изменениями пиксельных координат, что подтверждается линейным уравнением первой степени аппроксимирующей линии, а также значением величины достоверности аппроксимации R 2 , близким к единице.
Используя соотношение (2), а также зависимость, полученную на рис. 3, можно получить совокупность формул, описывающих процесс расчета времени прибытия облаков в точку расположения камеры на основе данных об изменении пиксельных координат проекции верхней границы облачности на матрице оптико-электронного устройства:
|
|
(3) |

где x i — расстояние на матрице оптико-электронного устройства от центра изображения до ближайшей точки границы приближающейся облачности, выраженное в количестве пикселей.
Для реализации представленной схемы съемки небесной полусферы был разработан алгоритм определения параметров облачности в земной атмосфере по изображениям с широкоугольной камеры, схема которого представлена на рис. 4.
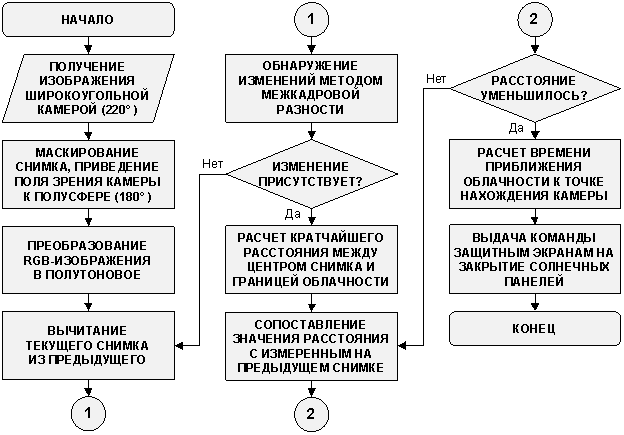
Рис. 4. Схема алгоритма расчета времени приближения облачности к точке расположения камеры
Алгоритм определения параметров облачности в земной атмосфере по изображениям с широкоугольной камеры реализован в программной среде Python с использованием библиотек opencv (библиотека компьютерного зрения для анализа, классификации и обработки изображений) [7].
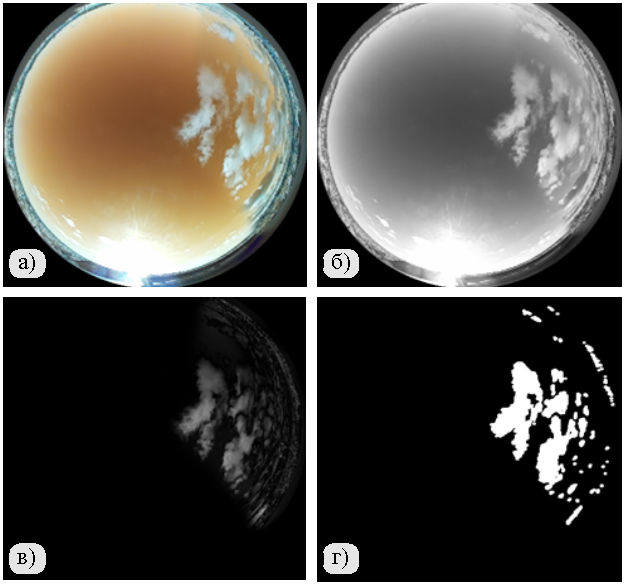
Рис. 5. Результаты промежуточных этапов обработки изображений небосвода с широкоугольной камеры: а) результат маскирования; б) изображение в оттенках серого; в) результат межкадровой разности; г) пороговая обработка межкадровой разности
Угол поля зрения широкоугольной камеры, используемой в эксперименте, составляет 220°. Для приведения величины угла поля зрения к требуемому значению 180° (обзор небосвода) к изображению применяется маска, ограничивающая полученное значение до требуемого. Результат маскирования представлен на рис. 5, а. Далее выполняется переход от цветного изображения к полутоновому с целью снижения количества вычислений и обработки наиболее информативной (яркостной) компоненты изображения (рис. 5, б).
Для регистрации перемещения облачной массы по кадрам, полученным широкоугольной камерой, выполняется вычитание значений яркости пикселей текущего кадра из соответствующих значений яркости пикселей предыдущего кадра (рис. 5, в). При этом изображение статичного фона формирует темные области результата разности, а область смещения облаков дает положительный отклик в изображении разности. Результат вычитания подвергается дальнейшей пороговой обработке для получения двоичной маски, содержащей зоны возможных областей перемещения облачности. Результат порогового преобразования показан на рис. 5,д.
При обнаружении изменений в изображениях небесной полусферы производится расчет минимального расстояния от центра кадра до границы обнаруженного объекта и запись полученного значения в виде динамической переменной. Обработка следующей пары кадров и сопоставление рассчитанного значения расстояния с записанным ранее позволяет сделать вывод о времени приближения облачности к точке расположения камеры в соответствии с выражением (3). При превышении порогового значения времени приближения алгоритм выдает команду защитным экранам марсохода на закрытие солнечных панелей.
Для проведения экспериментальных исследований разработанной системы предупреждения о приближении пылевой бури был спроектирован и собран исследовательский аппарат на базе марсохода Соджорнер. Схемы для 3D-печати элементов марсохода были предоставлены российским изобретателем и мастером робототехнических устройств Александром Корвиным [8, 9]. Оптико-электронная система и механизм закрытия солнечных элементов спроектирован и собран самостоятельно. Внешний вид исследовательского аппарата представлен на рис. 6.
Каркас марсохода выполнен из конструкционного алюминиевого профиля, детали подвески и колеса напечатаны на 3D-принтере из пластика PLA . Для движения колес использованы мотор-редукторы с частотой вращения 60 об/мин и крутящим моментом 9 кг/см. Управление колесами осуществляется при помощи микрокомпьютера Arduino Nano и аппаратуры радиоуправления. Управление защитными экранами панелей солнечных батарей осуществляется при помощи микрокомпьютера Raspberry Pi , который обрабатывает данные с широкоугольной камеры, расположенной на верхней панели марсохода и направленной в зенит.
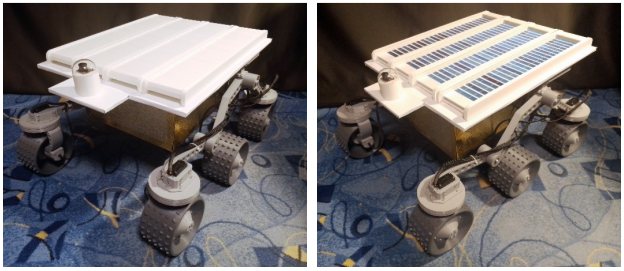
Рис. 6. Внешний вид исследовательского аппарата с закрытыми и открытыми солнечными панелями
Суть эксперимента заключалась в моделировании процесса приближения пылевой бури к точке местоположения марсохода и ответной реакции марсохода путем закрытия защитных экранов панелей солнечных батарей с целью предотвращения снижения эффективности их работы.
Эксперимент проводился в два этапа. На первом этапе исследования проводились в закрытом пространстве, при этом в качестве приближающейся бури использовался любой подходящий объект, перемещаемый вручную относительно марсохода. На втором этапе исследования проводились на открытом пространстве путем регистрации и оценки скорости движения облачности относительно точки местонахождения марсохода.
Вероятность правильной работы аппаратно-программного комплекса рассчитывалась как отношение количества запусков, в ходе которых система сработала адекватно условиям, к общему количеству запусков:
|
|
(5) |
Кроме того, в рамках проведенных экспериментов первого этапа рассчитывалась величина ошибки работы системы первого («пропуск цели») и второго рода («ложное срабатывание») при обнаружении облачности. В каждом случае тестового запуска аппаратно-программного комплекса выполнялось моделирование перемещения облака в сторону марсохода. Результаты экспериментальных исследований представлены в табл. 1.
Таблица 1
Результаты экспериментальных исследований
|
№ п/п |
Условия эксперимента |
Оцениваемый параметр | ||
|
Вероятность обнаружения |
Вероятность ошибки I рода |
Вероятность ошибки II рода | ||
|
1 |
В закрытых условиях |
89 % |
3 % |
8 % |
|
2 |
На открытой местности |
74 % |
9 % |
17 % |
По результатам работы можно сделать вывод, что применение технологий компьютерного зрения в бортовых оптико-электронных системах марсианских исследовательских аппаратов позволит повысить эффективность работы марсианских миссий за счет предотвращения последствий пылевых бурь.
Литература:
1. Данченко О. М. Марковская модель плотности атмосферы Марса (рус.) // Электронный журнал «Труды МАИ». 2012. Вып. 50. С. 15.
2. Gichu, R., Ogohara, K. Segmentation of dust storm areas on Mars images using principal component analysis and neural network. Prog Earth Planet Sci 6, 19 (2019). https://doi.org/10.1186/s40645–019–0266–1.
3. Шапошников Д. С., Медведев А. С., Родин А. В. Моделирование фотодиссоциации водяного пара в сезон пылевых бурь на Марсе // Астрономический вестник. 2022. Том 56. № 1. С. 27–35.
4. Yu. N. Izvekova, S. I. Popel, O. Ya. Izvekov Dust and dusty plasma effects in Schumann resonances on Mars: Comparison with Earth. Icarus, Vol. 371, 2022. ISSN 0019–1035, https://doi.org/10.1016/j.icarus.2021.114717.
5. Michael Battalio, Huiqun Wang, The Mars Dust Activity Database (MDAD): A comprehensive statistical study of dust storm sequences. Icarus. Vol. 354, 2021. ISSN 0019–1035, https://doi.org/10.1016/j.icarus.2020.114059.
6. Спецификация микрокомпьютера Raspberry Pi 5 [Электронный ресурс]. URL: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/specifications. Дата обращения: 23.01.2025.
7. Open Source Computer Vision [Электронный ресурс]. — URL: https://docs.opencv.org/4.x/index.html. Дата обращения: 23.01.2025.
8. Канал в Дзене «Мастерская Александра Корвина» [Электронный ресурс]. URL: https://dzen.ru/akw?ysclid=m6doc7nlom35170761. Дата обращения: 23.01.2025.
9. Сайт с описанием проекта марсохода Соджорнер от изобретателя Александра Корвина [Электронный ресурс]. URL: https://www.thingiverse.com/thing:53428351. Дата обращения: 23.01.2025.