В статье автор изучает проблему вероятного истощения железной руды на планете Земля и разрабатывает альтернативный способ для ее восполнения.
Ключевые слова: железная руда, ровер, магнитная сепарация, космический робот, Марс, Lego Mindstorms, марсоход.
На сегодняшний день полезные ископаемые являются неотъемлемой частью жизни людей. Из года в год численность мирового населения Земли стремительно увеличивается, вследствие чего резко повышается необходимость обеспечения потребностей человечества в природных запасах [1, с.23–24]. При дальнейшем многочисленном строительстве промышленных объектов и ускоренном темпе развития технического прогресса, в недалеком будущем может произойти истощение важных минеральных ресурсов на Земле.
Так, наиболее значимым и часто используемым металлом на нашей планете считается железо. В качестве ценного производственного сырья для его получения служат магнетитовые и гематитовые руды, где содержание концентрата составляет более 70 % [2, с.3–4]. Согласно предварительной оценке института астрономии Российской Академии Наук, при самом «плохом» прогнозе вероятность наступления дефицита железа на Земле должна произойти в 2049 году [4, с.49].
Именно поэтому современному поколению уже сейчас необходимо задуматься о поиске выхода из сложившейся непростой ситуации. Альтернативным способом для решения данной проблемы может стать применение высокотехнологичного метода магнитной сепарации при добыче железа на ближайшей доступной планете. По геологической структуре и составу, наиболее всего для поставленной цели подходит Марс. Об этом свидетельствует тот факт, что в 2012 году ровер Curiosity произвел посадку на «Красной планете» и обнаружил на ней существенное количество гематита и магнетита [5].
Для реализации такой сложной и комплексной задачи потребуется создать современное роботизированное устройство. Однако при его разработке следует учитывать, что робот должен не только осуществлять поиск руды, но и выполнять функцию качественной сортировки сырья.
Основой для сборки марсохода является конструктор LEGO Mindstorms EV3. На начальном этапе моделирования нужно сформировать каркас космического ровера из балок и пинов, а затем последовательно установить на него моторы (рис.1).

Рис. 1. Сборка каркаса робота и присоединение моторов
Эксплуатация специальных функциональных колес позволит улучшить передвижение робота на марсианском грунте. В связи с чем, они распечатываются из пластика на 3д принтере с помощью программы Cura (рис.2).

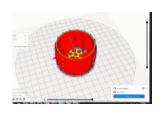


Рис. 2. Функциональные колеса марсохода
У марсохода 6 колес, которые при правильном использовании, в отличие от гусениц, позволяют совершать более маневренные и плавные перемещения. Кроме того, они имеют небольшой вес и простую конструкцию, поэтому обеспечивают надежность движения при столкновении с песчаным холмом, при наезде на камни и др. При выходе из строя одного колеса, ровер может успешно продолжать работу разведчика на остальных.
Для определения объектов, находящихся непосредственно перед роботом, целесообразно подключить ультразвуковой сенсор с диаметром «зоны видимости» 40 см. С целью идентификации магнитного марсианского грунта также потребуется задействовать датчик цвета, настроенный на распознавание черного оттенка. Для более корректной работы датчика цвета в корпусе ровера устанавливается светодиод (рис.3).

Рис. 3. Подключение датчиков и установка светодиода
Учитывая низкую гравитацию и большое количество сухого реголита на Марсе, для добычи железной руды было решено использовать открытый способ. При таком методе сырье соскребается с поверхности космического объекта с помощью захватывающего устройства по типу «ковша» (рис.4).

Рис. 4. Захватывающее устройство для железной руды
В последующем, после извлечения руды с поверхности, ее потребуется переработать и разделить на фракции. В связи с этим, необходимо применить метод магнитной сепарации или метод обогащения. В основе методики лежит разделение гематита и магнетита под воздействием постоянного магнитного поля с учетом их разной магнитной восприимчивости. Для этого на 3д принтере распечатывается пластиковый барабан с зубьями, на внутреннюю поверхность которого располагаются неодимовые магниты (рис.5).
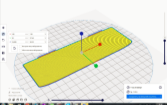


Рис. 5. Установление барабанного сепаратора и неодимовых магнитов
При движении космического робота магнитный сепаратор начинает вращаться от специально установленного дополнительного источника энергии (рис.6):

Рис. 6. Дополнительный источник энергии для работы барабана
Самой главной частью ровера является программируемый блок EV3, размещаем его на основу роботизированной конструкции (рис.7).


Рис. 7. Присоединение программируемого блока EV3
Нельзя забывать о том факте, что Марс обладает достаточно тонкой атмосферой и практически лишен магнитного поля. Соответственно для защиты корпуса робота от радиационного излучения следует установить на его каркас светоотражающий экран (рис.8).

Рис. 8. Установление защитного светоотражающего экрана
На последнем этапе моделирования необходимо соединить все датчики и моторы к основному блоку управления с помощью кабелей. Готовый марсоход представлен на рис.9.

Рис. 9. Готовая модель марсохода с магнитным сепаратором
Работа ровера осуществляется в автономном режиме с применением программы, составленной в приложении LEGO MINDSTORMS Education EV3. Она представляет собой алгоритм в виде последовательных программных блоков, обеспечивающих выполнение определенных действий роботизированного устройства (рис.10).
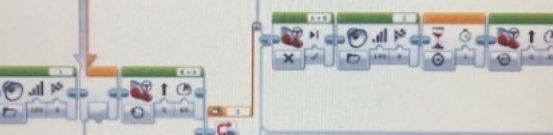
Рис. 10. Пример записи линейного алгоритма на языке программирования EV3
В процессе научных экспериментов необходимо полное взаимопонимание между роботом и программистом. Для этого используются три звуковых сигнала, воспроизводящихся через встроенный динамик микроконтроллера: «Выполняется сканирование», «Объект обнаружен», «Возвращаюсь на базу». Для подключения модуля EV3 к компьютеру используется кабель USB, через который непосредственно загружается программа [3, с.9].
Следующим шагом для исследований стал запуск марсохода, во время которого успешно осуществляется захват железной руды с последующей магнитной сепарацией (рис.11). Под действием магнитного поля, магнетит притягивается к поверхности барабана, а затем попадает в специальный лоток. В то же время гематит с примесями движется под сепаратором, при этом не изменяя траекторию под влиянием неодимовых магнитов. В дальнейшем он продолжает поступать и оказывается в своем сортировочном контейнере для предстоящей транспортировки и переработки. После сепарации минералов железа и обнаружения датчиком магнетита, робот начинает доставлять руду на базу.

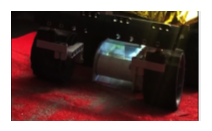
Рис. 11. Процесс сепарации путем извлечения магнитных частиц
По итогу работы, на рис.12. отчетливо видно, что марсоход смог найти и разделить минералы железной руды между собой.

Рис. 12. Разделенные фракции магнетита и гематита с примесями
Таким образом, в результате практических экспериментов становится совершенно очевидным, что альтернативным способом восполнения высококачественной железной руды для человечества в будущем может стать применение метода магнитной сепарации на Марсе. Хотелось бы надеяться, что с помощью роботизированных устройств эта технология станет ключевым фактором в развитии межпланетной экономики и откроет человечеству новые возможности в освоении космоса.
Литература:
1. Ибатуллин А. Р., Богданов К. К., Подгорбунская В. А. Анализ перспектив добычи полезных ископаемых на астероидах // Молодой ученый.2023. Вып. 28 (475). С.23–26.
2. Методические рекомендации по применению Классификации запасов месторождений и прогнозных ресурсов твердых полезных ископаемых. Железные руды. Разработаны Федеральным государственным учреждением «Государственная комиссия по запасам полезных ископаемых» (ФГУ ГКЗ) по заказу Министерства природных ресурсов Российской Федерации. Москва. 2007, 40 с.
3. Шадрин И. В. Учебное пособие по программированию в среде Lego Mindstorms EV3, г. Колпашево, 2017, 40 с.
4. Шустов Б. М. Космические ресурсы для развития экономики и науки // Воздушно-космическая сфера. 2019. Вып. № 4. С. 46–54.
5. Интернет источник: Same Day News: официальный сайт. URL: https://www.-asdnnet.ru/n/14762-v-marsianskoj-porode-byl-nayden-mineral.html (дата обращения: 22.10.24)

