С 2024 года на базе МОУ «МГМЛ» работает центр БАС, направленный на изучение строения и технологии беспилотных авиационных систем, а также разработку проектов по их оптимизации. Занятия в данном центре позволяют нам не только осваивать навык управления беспилотными авиационными аппаратами, но и реализовывать собственные инженерные проекты. В этом году для участия в конкурсе «Инженерные кадры России» («ИКаР») вместе с нашими руководителями мы создали прототип радиоуправляемого планера с беспилотной машиной на борту для доставки грузов в труднодоступные места.
Актуальность нашей разработки обусловлена тем, что во многих регионах отсутствуют полноценные транспортные узлы, дороги, мосты или аэродромы. Это затрудняет своевременную поставку медикаментов, продуктов питания, образовательных и бытовых товаров, а также аварийную доставку в зоны стихийных бедствий и конфликтов.
Решить эту проблему мы предлагаем с помощью комбинированной системы «планер + РУ-модель с полезной нагрузкой». Это позволит снизить зависимость от инфраструктуры, обеспечит быструю навигацию в условиях ограниченной видимости и сложного рельефа, а также уменьшит риск человеческого присутствия в опасных районах.
Согласно идее проекта, грузовой модуль планером доставляется до заранее определённой зоны, после чего спускается на парашюте и, двигаясь по земле, привозит груз на место.
Любая авиационная система строится вокруг силовой установки, поэтому первой задачей стал поиск оптимального радиоуправляемого планера и РУ-модели, с хорошей проходимостью по сложному рельефу.
Изначально нами были выбраны 2 устройства: планер ASW28 и RC-модель Remo-hobby SMAХ. Однако анализ технических характеристик данных моделей показал, что их применение может ограничить возможности выполнения поставленных задач. Мы остановили свой выбор на планере «Стерх», так как он имеет больший размах крыльев, а следовательно, и большую грузоподъемность. Модель полностью печатается на 3D-принтере, что снимает проблему с поиском и заменой деталей. Вместо SMAХ было принято решение использовать радиоуправляемую модель собственной разработки, специально спроектированную под задачи проекта (см. рис. 1).
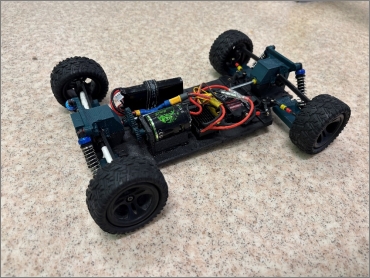
Рис. 1. Радиоуправляемая модель собственной разработки
После выбора модели планера, мы приступили к его изготовлению. На 3D-принтере Creality K1 Maх были напечатаны консоли крыльев, киль и руль высоты. Для производства фюзеляжа планера использовались два 3D-принтера Two Trees BLU-3 (см. рис. 2).
После печати всех деталей началась сборка. Монтаж деталей производился с помощью кусочков филамента и цианакрилатного клея (см. рис.3).
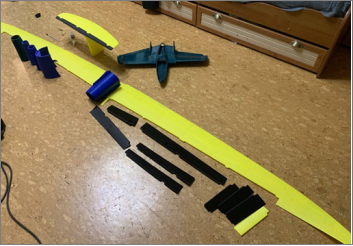
Рис. 2. Комплектующие модели планера «Стерх»

Рис. 3. Модель планера «Стерх» в сборе
При монтаже электронной системы управления мы использовали полетный контроллер speedybee f405 wing mini (FC BOARD и PDB BOARD), так как он дешевый и подходит для наших задач. В качестве видео-передатчика на данный момент используется caddx vista(VТХ), в будущем планируется поставить аналоговую систему для большей дальности сигнала. Радиоприемник был взят es900(ELRS915), его протокол ELRS915 позволяет управлять планером на очень дальних расстояниях (до 30км). Регулятор оборотов стоит на 80а(ESC), в качестве мотора используется мотор 3530 1000кв (MOTOR). GPS модуль (GPS) стоит m10, что дает хороший сигнал и надежность. В качестве сервоприводов стоит SG90(SERVO1–7). Схема использует lion 6S батарею на ячейках 18650.
В качестве ручного управления планера используется аппаратура JUMPER T-20 ELRS915, для управления RC-моделью используется на данный момент FR-SRY, модель управляется исключительно с помощью оператора. На полетном контроллере стоит прошивка ARDU-PILOT, что позволяет планеру работать без оператора, но при экстренных ситуациях управление можно перехватить.
В качестве полезной нагрузки планер может нести RC-модель с грузом или кейс с грузом. Для RC модели с помощью 3D-печати был изготовлен корпус с отсеком под парашют и груз (см. рис. 4).
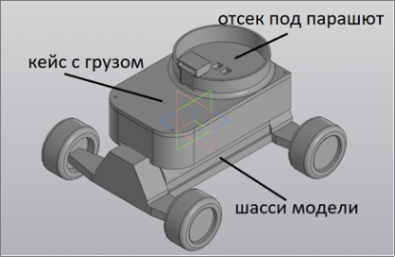
Рис. 4. 3D-модель RC-модели
На данный момент в модели как управление используется протокол FR-SKY, что позволяет использовать данную схему только на тестах, в планах поставить ELRS915 и аналоговую видеосистему. На RC-модели вместо колес планируется использовать гусеничные блоки, что обеспечит повышенную устойчивость и проходимость.
Таким образом, в ходе работы над проектом мы изучили аэродинамические свойства БВС, применимые к радиоуправляемому планеру, научились работать с ручным, пневматическим и электрическим инструментом, станками, 3D-принтером; производить сборку прототипа из определенных материалов, а также производить и тестировать прототип. Итогом нашей работы стал полностью рабочий прототип радиоуправляемого планера с беспилотной машиной на борту, готовый для решения поставленных задач.
Литература:
- Андреев В. С. Применение полимерных композиционных материалов в авиастроении. — М.: Химия, 2010. — 256
- Андреевский В. В. Проектирование планеров. — М.: Оборонгиз, 1951. — 247 с.
- Фомин В. Н., Щербаков А. С. Беспилотные летательные аппараты: основы устройства и функционирования. — СПб.: ГУАП, 2013. — 264 с.
- Шайдаков В. И., Гайдаренко О. В. Основы аэродинамики и динамики полета беспилотных летательных аппаратов. — М.: ИНФРА-М, 2017. — 192 с.

