В статье автор приводит результаты разработки программы управления квадрокоптером Геоскан Пионер Мини.
Ключевые слова: квадрокоптер, Геоскан Пионер Мини, программа, Python.
Квадрокоптером называется беспилотный летательный аппарат, который имеет четыре пропеллера. Управление квадрокоптером осуществляется дистанционно с помощью смартфона или специального пульта. Одним из важных элементов квадрокоптера является мини-камера, которая позволяет оператору управлять аппаратом. Подъем и снижение квадрокоптера осуществляется за счет увеличения или снижения количества оборотов всех четырех моторов (см. рис. 1).

Рис. 1. Квадрокоптер «Пионер мини» компании Geoscan
Уже целый год я занимаюсь в лицее по программе «Пилотирование и программирование беспилотных авиационных систем (БАС)». Практические занятия у нас проходят с квадрокоптерами Геоскан Пионер мини. Это небольшие модели, которые можно запускать даже в помещениях. Уже на первых уроках я понял, что, для того чтобы научиться успешно управлять квадрокоптером, мне необходима не только практика, но и теоретические знания по физике, математике, информатике. С каждым занятием у меня появлялось все больше опыта, и на сегодняшний день я знаю, как устроен квадрокоптер, и основные принципы его работы, на реальных примерах разобрал физику полета, получил базовые навыки пилотирования, а самое главное — у меня появилось новое интересное хобби.
Еще один полезный навык, который я развил, занимаясь беспилотными летательными аппаратами, — это самостоятельное программирование электронного устройства. Полеты квадрокоптеров компании Геоскан осуществляются с помощью программы, разработанной производителями данной модели. Для управления квадрокоптером необходимо на телефон установить мобильное приложения Geoscan Jump. Этой программы вполне достаточно для получения начальных навыков управления квадрокоптером. Освоив работу в данном приложении, мне захотелось написать собственную программу для квадрокоптера и проверить, как она будет работать на практике. Для написания программы я решил использовать язык Python и библиотеки pioneer_sdk.
Для создания программы я установил на своем компьютере версию Python 3.12, среду программирования PyCharm и загрузил библиотеку pioneer_sdk. Затем я разработал внешний вид программы (рис. 2). В окне я разместил вид с камеры, клавиши управления квадрокоптером и служебную информацию.
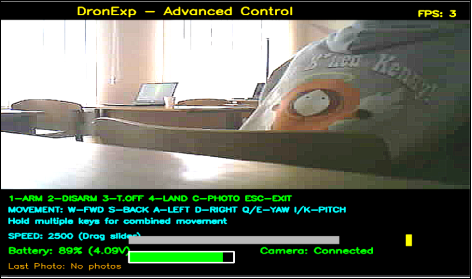
Рис. 2. Интерфейс программы
Для управления квадрокоптером были задействованы следующие клавиши:
— «1» позволяет включить квадрокоптер в режиме «Arm»,
— «2» позволяет выключить квадрокоптер,
— «3» осуществляет взлёт квадрокоптера,
— «4» включает приземление,
— «Esc» — аварийное отключение моторов квадрокоптера,
— «W», «A», «S», «D» — для перемещения вперед, назад, вправо и влево соответственно,
— «Q» — вращение влево, «E» — вращение вправо,
— «I» — увеличивает скорость вращения пропеллеров, «K» — уменьшает скорость вращения пропеллеров.
На экране отображается служебная информация:
— «Speed» отвечает за скорость квадрокоптера,
— «Battery» — процент заряда и текущее значение напряжения аккумуляторной батареи,
— «Camera» — готовность камеры квадрокоптера для сьёмки,
— «Last photo» — указание на последнюю сделанную фотографию.
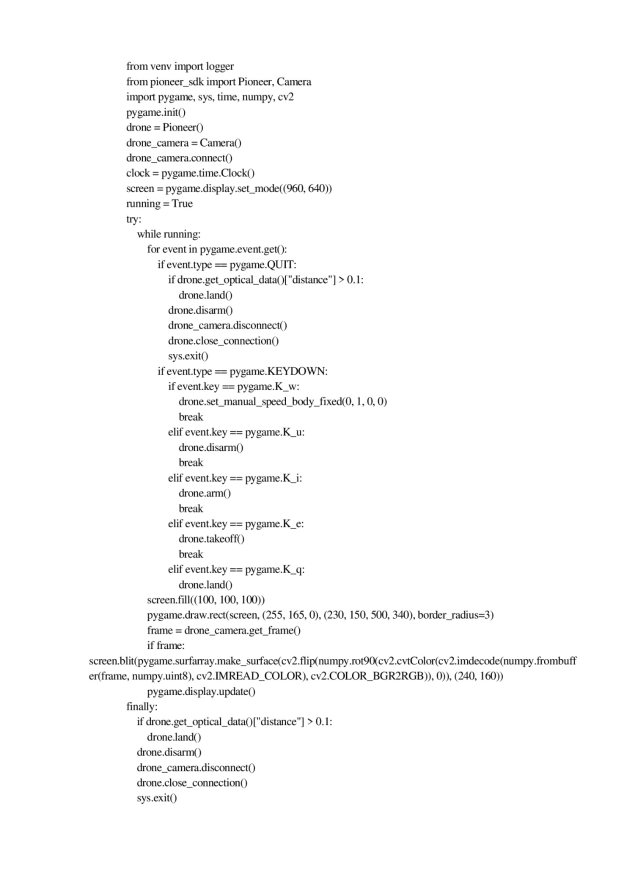
После запуска PyCharm: в окне Terminal загружаем библиотеку pioneer_sdk. Создаём файл Python File c именем dron.py. Подключаем библиотеки и импортируем модули. Создаем переменные для сохранения фото, управления скоростью, отслеживания заряда батареи. Создаем окно, в которое выводится информация с камеры и служебная информация. Основная часть программы запускается с помощью цикла try, который позволяет отслеживать нажатия клавиш.
Ниже приведен текст программы.
Порядок работы с программой:
- Установить на компьютере Python, PyCharm.
- Включить квадрокоптер и подключиться к Wi-fi сети этого дрона (пароль везде один: 12345678).
- Запустить файл Dron.py в приложении PyCharm.
- В открытом окне приложения будут указаны функции дрона и заряд.
Заключение. В результате проведенной работы мне удалось написать и протестировать собственную программу для квадрокоптера, провести испытания и получить положительные результаты.
Среди трудностей можно отметить необходимость настройки связи и калибровки датчиков, а также адаптацию программного кода под конкретную модель. Все эти задачи были успешно решены.
В дальнейшем можно расширить функциональность дрона, добавить новые алгоритмы автономного управления, интегрировать дополнительные датчики и усовершенствовать программное обеспечение для более сложных задач.
Литература:
- Труд (технология). Беспилотные летательные аппараты: 8–9-е классы: учебное пособие / М. В. Луцкий, Д. В. Швецов, С. И. Николаев, Н. С. Семёнов. — Москва: Просвещение, 2025. — 144 с.
- Беспилотные летательные аппараты: основы конструкции и управления для 10 класса: учебное пособие / Д. А. Ханжин. — Москва: Русское слово, 2025. — 256 с.
- Геоскан Пионер документация. Программирование на Python https://docs.geoscan.ru/pioneer/programming/python/python_main.html

