Современные алгоритмы фотограмметрической обработки данных воздушной разведки позволяют рассчитывать карту высот исследуемого района. Такие данные можно использовать для более точного расчета координат наземных целей. Вследствие этого беспилотным летательным аппаратом (БПЛА) целесообразно осуществлять предварительный облет местности, на которой планируется производить воздушную разведку объектов и определять их географические координаты. Полученная при таком облете информация должна быть обработана с использование современных прикладных программ с целью расчета актуальной карты высот и дальнейшей загрузки её в базу данных бортового компьютера БПЛА. В дальнейшем она используется для расчета безопасной высоты полета и корректировки координатометрии, произведённой угломерно-дальномерным способом.
В настоящее время наблюдается тенденция как роста использования беспилотных летательных аппаратов, так и разработки целевого оборудования на них. Появляются гиростабилизированные платформы на базе бесплатформенных инерциальных систем, в состав которых входят следующие устройства на базе технологии микроэлектромеханических систем — акселерометр, гироскоп, барометр и магнетометр. Учитывая особенности данных устройств, появляются широкие возможности к разработке систем определения географических координат с использованием беспилотного летательного в режиме аппарата реального времени.
Способ определения координат наземных объектов может быть реализован в беспилотном робототехническом комплексе, на котором размещен дополнительный бортовой компьютер, реализующий алгоритмы автоматического обнаружения и распознавания наземных объектов с последующим определением их координат с учетом актуальной карты высот.
Устройство, реализующее способ определения координат наземных объектов представлено на рисунке 1 и включает в себя:
-
Беспилотный летательный аппарат
- Бортовой вычислитель
- Блок видеонаблюдения
- Гиростабилизированная платформа с акселерометром и гироскопом
- Лазерный дальномер
- Приёмо-передающее устройство
- GPS приемник с магнетометром
-
Наземный пункт управления
- Приёмо-передающее устройство
- Устройство отображения координат объектов
Предложенный способ предполагает реализацию на бортовом компьютере беспилотного комплекса трех алгоритмов:
1) Алгоритма автоматического обнаружения и распознавания наземных объектов на основе нейронных сетей;
2) Алгоритма автоматического сопровождения цели (демонстрация).
3) Алгоритма определения координат целей с учетом актуальной информации о карте высот в районе воздушной разведки, позволяющей повысить точность их определения.
Расчет координат осуществляется на основе данных, собранных с акселерометра, гироскопа, магнетометра, барометра, приемника СНС и лазерного дальномера (показ), установленных на БПЛА.
Выполнение алгоритмов осуществляется непосредственно на борту БПЛА в режиме реального времени, на самостоятельно разработанном программном обеспечении.
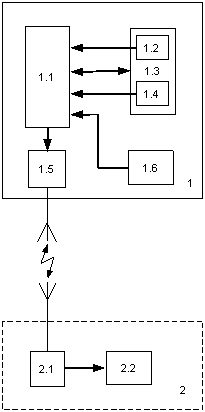
Рис. 1. Устройство для определения координат наземных объектов
В известных угломерных способах расчета координат есть существенный недостаток относительно систем с грубой точностью определения угловых координат. Для таких систем необходим модернизированный подход, учитывающий наличие возможностей современных вычислительных ресурсов и относительной их доступностью. Представленный подход основан на применении численных алгоритмов минимизации квадратичной ошибки между расчитанной высотой и значением на карте высот в рассчитанном местоположении. Такую ошибку будем называть мерой и обозначим за J , которая определяется как

где h — абсолютная высота БПЛА; d — наклонная дальность; α 1 — азмут (рыскание);
α
2
— угол наклона камеры (тангаж);



В результате, задача поиска минимума сводится к отысканию таких значиний углов α 1 , α 2 , при которых функционал J будет минимальный. Для простоты реализации математической модели был применен метод наискорейшего спуска.
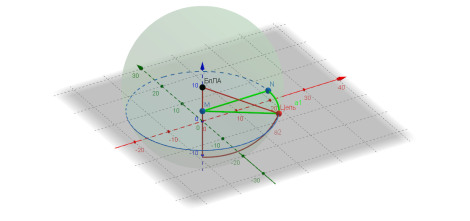
Рис. 2. Принцип определения координат целей с БПЛА
Таким образом, представленный способ определения координат наземных объектов позволяет более точное определить координат выбранных объектов угломерно-дальномерным способом. Отличительной особенностью способа является повышение точности определения координат целей с использованием актуальной информации о карте высот, а также возможность выполнения расчетов в режиме реального времени непосредственно на борту БПЛА.
Литература:
- Тяпкин В. Н. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография / В. Н. Тяпкин, Е. Н. Гарин. — Красноярск: Сиб. федер. ун-т, 2012. — 260 с.
- Сырямкин В. И., Шидловский В. С. Корреляционно‑экстремальные навигационные системы. — Томск: Изд-во Томского ун-та, 2010.‑316 с.

