В данной статье рассмотрены основные принципы работы с микрофлюидными устройствами, предлагается вариант создания микрофлюидной системы в условиях школьной лаборатории.
Ключевые слова: инерциальная микрофлюидика, микрофлюидный чип, разделение частиц.
Микрофлюидика — междисциплинарная, интенсивно развивающаяся область, которая занимается работой с малыми потоками жидкостей, используя их необычную физическую природу для самых разных целей. Это направление на данный момент имеет огромное количество применений и видов устройств [1], позволяющих сильно упростить работу в лаборатории и совершенствовать исследовательскую деятельность.
Исходя из актуальности инерциальной микрофлюидики, большого количества перспективных направлений, и имеющихся проблем внедрения в малооснащенные лаборатории соответствующих систем, наша группа живо заинтересовалась этой темой. По проведенной работе по модернизации и упрощению имеющихся аналогов и написана эта статья.
Одна из важнейших задач микрофлюидики — это разделение микро- и нанообъектов. Этот раздел называется сепаративной микрофлюидикой [2] и включает в себя большое количество методов, которые различаются схеме разделения необходимых частиц — это достигается благодаря различным видам микрофлюидного чипа, разделяющего устройства [3].
Цель данной работы — создать и протестировать установку на основе инерциального микрофлюидного чипа. Для этого необходимо: собрать насос, способный поддерживать достаточной степени равномерное давление жидкости внутри системы, создать микрофлюидный чип, собрать установку и провести испытания устройства.
Материалы и методы
В ходе работы над проектом для создания насоса был использован станок лазерной резки, с помощью которого были вырезаны детали из листовой фанеры толщиной 5 мм. В качестве направляющих был использован металлический стержень, разделённый на две части. Для создания необходимого крутящего момента использован шаговый мотор CNMAWAY 17HS4023 под управлением Arduino UNO R2 и драйвера DF-DRI0023. Насос работает посредством перехода вращательного движения электродвигателя в поступательное движение поршня двухкомпонентного пластикового шприца, который создает давление, необходимое в системе для работы. Для создания чипа был использован фотополимерный принтер Anycubic M3 MaX с шаговой точностью, позволяющей создать спиралевидный канал шириной в 150 мкм, а 3D-модель была построена в системе автоматизированного проектирования “Компас”. В качестве материала была выбрана прозрачная смола Anycubic ABS-Like Pro 2. Верхняя часть чипа закрывается прозрачной каптоновой лентой, способной выдерживать высокое давление внутри чипа. Прозрачность пленки позволяет наблюдать за процессами в каналах невооруженным глазом или через микроскоп. Шприц и чип соединяются ПВХ-трубками с сечением в 0,5 мм.
Все материалы, которые используются в составе чипа, шприца и трубок обладают инертностью по отношению к большинству растворителей и внешних раздражителей (свет, УФ-излучение, температура):
– Каптоновая полиимидная лента — ГОСТ 28026–89
– Смола Anycubic ABS-Like Pro 2
– Силиконовый герметик — ГОСТ 31340–2013
– ПВХ-трубки — ГОСТ 19034–82
Обсуждение результатов
Простейший инерциально-микрофлюидный чип представляет собой канал в виде плоской Архимедовой спирали, входом и расширением в конце для двух выходов. Принцип работы устройства заключается в пропускании однородной смеси разных по размеру частиц через каналы и их разделении в конце по двум потокам (на 2 выхода). Из-за формы канала и разных соотношений центробежной силы и силы Дина (физический смысл которых описан в статье [2]) частицы с меньшим диаметром устремляются к внешней стороне канала, в то время как более крупные собираются у внутренней (см. Рис. 1). Разделение потоков на конце канала позволяет собрать отсортированные частицы в два разных резервуара. Если видов частиц будет больше 2-х, то потребуется соответствующее количество выходов, параметры которых должны быть рассчитаны отдельно.
![Распределение частиц разного размера в каналах инерционной системы [2]](https://articles-static-cdn.moluch.org/articles/j/128271/images/128271-1.jpeg)
Рис. 1. Распределение частиц разного размера в каналах инерционной системы [2]
Практическая часть
Микрофлюидное устройство состоит из шприцевого насоса и микрофлюидного чипа. Насос подает жидкость в микрофлюидный чип, а также в зависимости от входных данных кода управления платой Arduino изменяет подачи жидкости. Он представляет собой деревянный каркас с металлическими направляющими (см. Рис. 2) (1), встроенным шаговым мотором (2), подключённым к плате Arduino (3) через драйвер (4); и двухкомпонентным шприцом (5), оборудованным иглой и соединяющей трубкой. К шаговому мотору, который является главной частью всего насоса, присоединена одна из фанерных пластин (6). К ней присоединяются две металлические направляющие (1), по которым может свободно перемещаться подвижная часть привода — вторая фанерная пластина (7). Ее перемещение обеспечивается шпилькой с упорной резьбой (8) и соответствующей гайкой (9), размещенной на подвижной части. Вращательное движение шпильки переводится в поступательное движение пластины и закрепленного в ней поршня шприца. В данной работе использовались двухкомпонентные медицинские шприцы из-за их большей устойчивости ко многим химикатам по сравнению с трехкомпонентными.
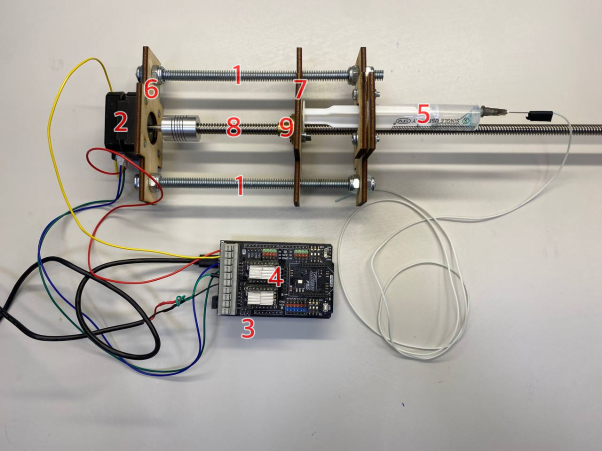
Рис. 2. Компоненты шприцевого насоса
Второй частью этой системы является микрофлюидный чип. Модель чипа представлена на Рис. 3. Канал — простая плоская Архимедова спираль с дугой-входом перед началом спирали, 5 полными витками и расширением на конце для разделения двух потоков (2 выхода).

Рис. 3. 3D-модель чипа, проекция сверху
Сечение каналов прямоугольное, размеры являются стандартными для чипов [1], работающих по принципам инерциальной микрофлюидики — 150 мкм в ширину и 50 мкм в высоту (фото под световым микроскопом с увеличением объектива x100 приведены на Рис. 4). Сеть каналов, то есть спираль из 5-ти витков, вход и выходы, занимает пространство в ~3.5 см². Ко входу и двум выходам через отверстия в каптоновой ленте присоединены ПВХ-трубки, подающие изначальный раствор и собирающие полученные разделенные растворы. Устройство многоразовое и может быть восстановлено при дефекте: в ходе производства из-за нештатной ситуации в стенке между каналами образовалось отверстие, которое было успешно закрыто при помощи силиконового герметика, нанесенного иглой под микроскопом.
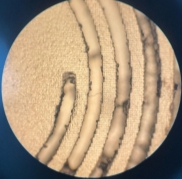
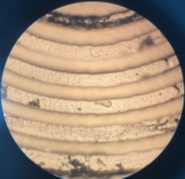
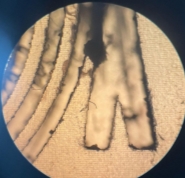
Рис. 4. Фрагменты чипа под микроскопом, слева направо: вход и первые витки, центральный участок чипа под микроскопом, выходы
Такой чип можно считать многоразовым, что позволяет экономить время и ресурсы на производстве подобных чипов. Как было сказано выше, в качестве растворителя для разделяемой смеси подходит большое количество жидкостей, как полярных, так и неполярных.
Дальнейшее развитие
Создав описанную выше установку, мы начали наработки в области развития проекта. Поскольку построенный нами чип является простейшим по конструкции для чипов, работающих по принципам инерциальной микрофлюидики, то возможен большой спектр вариантов усовершенствования устройства. Это достигается несколькими способами:
- Изменение геометрии канала
Представленный выше прототип имеет прямоугольное сечение каналов, однако возможны трапециевидные, скругленные и другие формы сечения, увеличивающие эффективность разделения, однако более ресурсо- и времязатратные в производстве [4]. Возможна модификация изменением параметров спирали: количество витков, расстояние между ними, линейные параметры канала и т. п.
- Объединение нескольких чипов в одну систему
Микрофлюидные чипы возможно собирать в последовательные конструкции, что позволит добиваться более высокой сепарации образца.
- Модификация конструкции насоса при помощи дополнительных шприцов и укрепления силовых узлов для создания равномерного потока.
- Подключение датчика давления в системе, электронной панели управления и других элементов пользовательского контроля.
Выводы
В ходе данной работы была спроектирована и создана микрофлюидная система в условиях школьной лаборатории, имеющая достаточно широкие перспективы развития. Установка проста в изготовлении и имеет высокий потенциал к модификации компонентов.
Благодарности: Авторы статьи выражают благодарность за предоставленное оборудование и средства Химическому Центру и Центру Робототехники Президентского ФМЛ № 239, а также лично Мартынову Матвею Игоревичу, Кутузову Всеволоду Александровичу и Дудко Семёну Николаевичу за помощь в технических и практических работах и Чаплинскому Михаилу Максимовичу за помощь в иллюстрировании статьи.
Литература:
- Hettiarachchi S, Cha H, Ouyang L, Mudugamuwa A, An H, Kijanka G, Kashaninejad N, Nguyen NT, Zhang J. Recent microfluidic advances in submicron to nanoparticle manipulation and separation. Lab Chip. 2023 Mar 1;23(5):982–1010.
- Kuntaegowdanahalli SS, Bhagat AAS, Kumar G, Papautsky I. Inertial microfluidics for continuous particle separation in spiral microchannels. Lab on a Chip. 2009;9:2973–80.
- Shin J. H.; Choi S. Open-source and do-it-yourself microfluidics. Sensors and Actuators B: Chemical.2021; 347: 130624.
- Scott SM, Ali Z. Fabrication Methods for Microfluidic Devices: An Overview. Micromachines. 2021; 12(3):319.

