В статье автор исследует ключевые функциональные элементы пальцевого механизма кисти гуманоидных роботов в конструкторско-технологическом решении задачи создания промышленных прототипов для замены человека в особо опасных условиях деятельности.
Ключевые слова: пальцевый манипулятор, число степеней подвижности, электрические приводы, гидравлические приводы, механические приводы, приводы тросовой системы, пневматические приводы.
Современная инженерная мысль неразрывно связана с поиском решений на стыке фундаментальных и прикладных наук — физики, математики, стереометрии, материаловедения, программирования функций управления сложной системой — и современных трендов развития цифровых программ обеспечения конструирования, моделирования механизмов и машин.
Автором был проведен анализ ключевых функциональных элементов гуманоидных роботов в конструкторско-технологическом решении задачи создания промышленных прототипов для замены человека в особо опасных условиях деятельности (манипуляторы, число степеней подвижности, способ перемещения). Современные теоретико-прикладные разработки в машиностроении позволяют вести поиск новых прикладных решений в создании современных промышленных манипуляторов, способных решать многопрофильные и многоцелевые функциональные задачи. Особенно важны базовые инженерные механизмы автоматизации движения конечностей и сочленений андроидного робота: электрические, гидравлические, механические приводы, а также приводы тросовой системы.
Проанализируем пальцевый манипулятор, моделирующий движения пальцев человека, и роликовый привод как наиболее применяемые инженерные решения для создания элементов андроидного робота.
Электрический привод — наиболее популярный тип приводов в роботах-гуманоидах, он имеет меньший размер. Однако один электрический привод дает недостаточно энергии для движения сустава (аналогичного человеческому по размеру) в кисти гуманоидного робота. Поэтому инженеры обычно используют несколько электрических приводов для одного сустава кисти гуманоидного робота.

Рис. 1. Рука андроида с электрическими приводами
Более высокую мощность, чем электрические и пневматические, имеют гидравлические приводы. Они обладают лучшей способностью контролировать создаваемый ими крутящий момент, чем приводы других типов. При этом они очень громоздкие по сравнению, например, с сервоприводами.
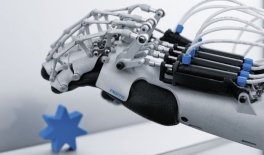
Рис. 2. Рука андроида с гидравлическими приводами
Механический привод осуществляет движения с помощью системы редукторов. К достоинствам данного привода относят низкую стоимость его разработки и высокую надежность. Его не применяют в конструировании пальцевого манипулятора гуманоидных роботов из-за отсутствия компактного и мощного электродвигателя, который позволил бы регулировать крутящий момент суставов и пальцев кисти гуманоидного робота.
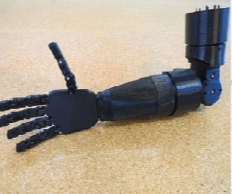
Рис. 3. Рука андроида с механическими приводами
Использование тросовой системы обусловлено в первую очередь необходимостью моделирования работы сухожилий человека. В таких манипуляторах каждый тросовый привод вынесен за пределы сустава кисти, что влечет за собой негативное воздействие внешней среды на механизм. Основным недостатком такого решения является меньшая сила сжатия пальцевого манипулятора.

Рис. 4. Рука андроида с тросовыми приводами
Самым распространенным видом кисти гуманоидных роботов остается пятипальцевый манипулятор, моделирующий движения пальцев человека. Прототипом стал робот iCub, созданный в Итальянском технологическом институте.
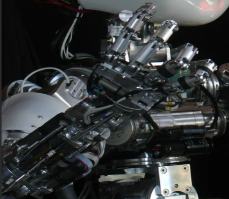
Рис. 5. Рука гуманоидного робота iCub
Движение руки робота iCub обеспечивается работой сервоприводов, что позволяет получить аналог движения руки человека при совершении необходимых операций. В конструкции используется двигатель постоянного тока, совмещенный с энкодером и датчиком Холла. Пальцевый манипулятор сложен в изготовлении. Вследствие малой мощности применяемых сервоприводов при сжатии пальцев кисти такой манипулятор не способен полноценно воспроизвести силу руки человека. При этом использование таких пальцевых манипуляторов является более предпочтительным в конструировании перспективных промышленных прототипов гуманоидных роботов, так как пальцевый манипулятор решает много функциональных задач при малых габаритах.
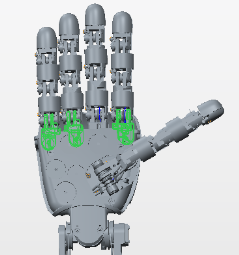
Рис. 6. Кисть робота гуманоида iCub
Автором проведен анализ перспективных инновационных решений отечественного машиностроения, которые могут быть применены в конструировании пальцевого манипулятора андроидного робота для обеспечения импортозамещения компонентов при создании механизмов андроидной робототехники.
Были разработаны собственные инновационные конструкторские решения для получения эффективной динамики кисти пальцевого манипулятора гуманоидного робота на основе сложного сопряжения взаимозависимых механизмов движения. Также автором применен принцип эксцентриково-циклоидального зацепления инновационной разработки российских инженеров из Томска В. В. Становского , С. М. Казакявичюса, Т. А. Ремневой, В. М. Кузнецова (патент RU 2 385 435 C1) в конструировании механизма движения рук гуманоидного робота [1, с. 1]. В расчетах при конструировании автором верифицирован предложенный Н. Р. Щербаковым [2] метод математического создания моделей систем передачи движения с применением эксцентриково-циклоидального зацепления в конструировании механизмов обеспечения движения андроидного робота.
В представленной на рисунке 7 схеме механизма пальца кисти андроидного робота движение функциональных элементов происходит с помощью пары гидравлических приводов, которые при необходимости могут быть заменены пневматическими.
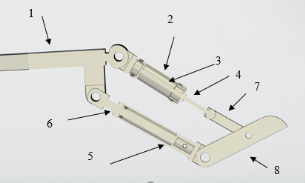
Рис. 7. Схема механизма пальца: 1 — голень, 2 — цилиндр пальца, 3 — стержень пальца, 4 — крышка цилиндра пальца, 5 — стержень ступицы, 6 — цилиндр ступицы, 7 — скоба, 8 — палец
Практическим результатом научно-исследовательской работы автора является доказательство эффективности замены основных конструктивных элементов пальцевого манипулятора андроидного робота, имеющее прикладное применение в машиностроении. Разработка и применение гуманоидных роботов сегодня определяет технологический суверенитет национального машиностроения и робототехники.
Принципиально новые технические решения при конструировании гуманоидных роботов обеспечат замену человеческого труда в сферах деятельности, связанных с высоким риском для жизни.
Литература:
- Патент № 2385435 C1 Российская Федерация, МПК F16H 55/08, F16H 1/08, F16H 19/04. Эксцентриково-циклоидальное зацепление составных зубчатых профилей: № 2008150967/11: заявл. 22.12.2008: опубл. 27.03.2010 / В. В. Становской, С. М. Казакявичюс, Т. А. Ремнева [и др.]. — EDN WFLJNW.
- Щербаков Н. Р. Математическое и компьютерное моделирование динамического состояния систем передачи движения : дис. ... докт. физ.-мат. наук : 05.13.18. — Томск, 2009. — 213 с.

