Современные задачи логистики, мониторинга перемещения объектов и обеспечения сохранности ценных грузов требуют применения компактных, автономных и надёжных технических средств контроля, способных функционировать в сложных климатических и эксплуатационных условиях. Как правило, существующие решения ориентированы либо только на спутниковую навигацию, либо на передачу данных по одному каналу связи, что снижает устойчивость системы при отсутствии сигнала или возникновении помех. Многие устройства не обеспечивают достаточного уровня автономности, защищённости передаваемой информации и оперативного оповещения о несанкционированном доступе к объекту [1].
Актуальность работы обусловлена возрастающей потребностью в средствах контроля местоположения грузов в условиях удалённых территорий, нестабильного покрытия сетей связи и повышенных требований к безопасности информации. Использование гибридного подхода, объединяющего GNSS-навигацию, сотовую триангуляцию и передачу данных через мобильные сети, позволяет повысить надёжность определения координат и доступность устройства для пользователя.
Целью работы является разработка портативного устройства гибридного позиционирования с функцией удалённого мониторинга и передачи данных, выполненного с использованием современных средств схемотехнического проектирования. Новизна предлагаемого решения заключается в совмещении в одном компактном корпусе функций спутникового позиционирования, удалённого программируемого включения, передачи координат через бота интернет-мессенджера, хранения данных при потере связи, контроля вскрытия и перемещения объекта, а также длительной автономной работы.
Анализ существующих решений
Для обоснования необходимости разработки собственного устройства рассмотрены наиболее распространённые коммерческие аналоги: Teltonika FMB920, Queclink GV350MG, Ruptela FM-Eco4+ и Galileosky 7x. Сравнительные характеристики приведены в таблице 1.
Таблица 1
Сравнение аналогов устройств позиционирования и мониторинга
|
Параметр |
FMB920 |
GV350MG |
FM-Eco4+ |
Galileosky 7x |
|
Стандарт связи |
2G |
4G LTE |
2G |
2G/3G/4G |
|
LoRa-радиомодуль |
Нет |
Нет |
Нет |
Нет |
|
Передача через мессенджер |
Нет |
Нет |
Нет |
Нет |
|
Шифрование данных |
Нет |
Нет |
Нет |
Нет |
|
Датчик вскрытия |
Есть |
Есть |
Нет |
Нет |
|
Автономная работа |
до 4 ч |
Нет АКБ |
< 1 ч |
до 2 ч |
|
Удал. вкл./выкл |
Нет |
Нет |
Нет |
Нет |
|
Точность позиц., м |
2,5 |
2,5 |
2,5 |
2,0 |
Анализ показывает, что ни одно из рассмотренных устройств не поддерживает передачу уведомлений через мессенджер, не оснащено резервным радиоканалом LoRa и не обеспечивает шифрования данных на уровне прошивки. Автономность аналогов ограничена 2–4 часами, что неприемлемо при мониторинге автономных грузов. Это обосновывает необходимость разработки устройства, объединяющего в едином корпусе функции GNSS-позиционирования, резервного радиоканала, передачи данных через бота, шифрования сообщений и длительной автономной работы [2].
Структура разрабатываемого устройства
Устройство гибридного позиционирования включает блок навигации и определения координат, блок обработки данных, блок связи и передачи данных, а также блок контроля состояния объекта. Основным методом позиционирования служит спутниковая навигация GNSS; при ослаблении сигнала дополнительно применяются Wi-Fi-позиционирование и сотовая триангуляция. Блок обработки реализован на микроконтроллере и выполняет сбор информации с датчиков, формирование пакетов и управление режимами энергосбережения.
Блок связи обеспечивает доставку координатной и телеметрической информации пользователю через GSM/LTE-модуль и бота интернет-мессенджера. При отсутствии покрытия сотовой сети активируется резервный радиоканал на основе технологии LoRa. Блок контроля состояния включает акселерометр, при срабатывании которого устройство незамедлительно формирует тревожное уведомление с передачей текущих координат. Структурная схема устройства приведена на рисунке 1.
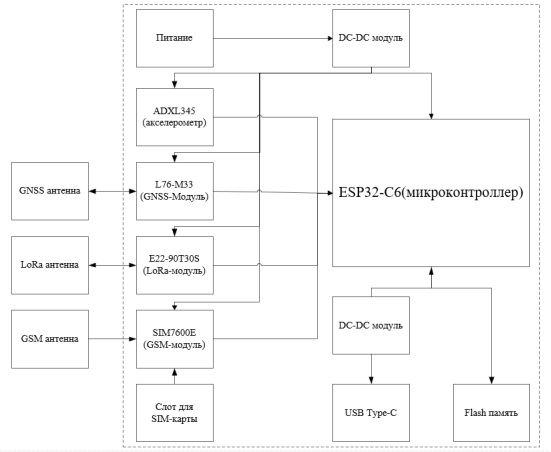
Рис. 1. Структурная схема устройства гибридного позиционирования
Обоснование выбора элементной базы
Выбор компонентов выполнялся по критериям точности, энергопотребления, наличия беспроводных интерфейсов и удобства интеграции. В качестве центрального элемента выбран микроконтроллер ESP32-C6, обладающий наибольшим среди рассмотренных платформ объёмом оперативной памяти (520 КБ), встроенными интерфейсами Wi-Fi и Bluetooth LE и низким током в режиме сна. Навигационный модуль Quectel L76-M33 обеспечивает точность позиционирования 1,5 м CEP при поддержке систем GPS, ГЛОНАСС, Galileo и BeiDou и токе потребления 18 мА в режиме трекинга [3].
Для основного канала связи выбран модуль SIM7600E (4G LTE Cat 4) с высокой чувствительностью GNSS-приёмника −159 дБм и широкой программной поддержкой [4]. Резервный радиоканал реализован на модуле LoRa E22–900T30S с выходной мощностью 30 дБм и дальностью связи до 10 км [5]. Контроль перемещения возложен на трёхосевой акселерометр ADXL345 с диапазоном до ±16 g и током ожидания 0,1 мкА [6]. Для сервисного подключения и заряда аккумулятора применён универсальный разъём USB Type-C. Итоговый состав элементной базы приведён в таблице 2.
Таблица 2
Выбранная элементная база устройства
|
Функциональный узел |
Компонент |
Ключевая характеристика |
|
Микроконтроллер |
ESP32-C6 |
RAM 512 КБ, Wi-Fi/BT/Thread |
|
GNSS-навигация |
Quectel L76-M33 |
Точность 1,5 м, 4 GNSS-системы |
|
Сотовая связь |
SIM7600E |
4G LTE Cat 4, GNSS −159 дБм |
|
Резервный радиоканал |
E22–900T30S |
LoRa, 30 дБм, до 10 км |
|
Контроль перемещения |
ADXL345 |
±16 g, ток ожидания 0,1 мкА |
|
Хранение данных |
W25Q128JVSIQ |
NOR Flash 128 Мбит |
|
Интерфейс / питание |
USB Type-C |
Заряд АКБ, программирование |
Разработка принципиальной электрической схемы
Принципиальная электрическая схема разработана на основании технического задания и структурной схемы с учётом требований к функциональности, надёжности и помехоустойчивости.
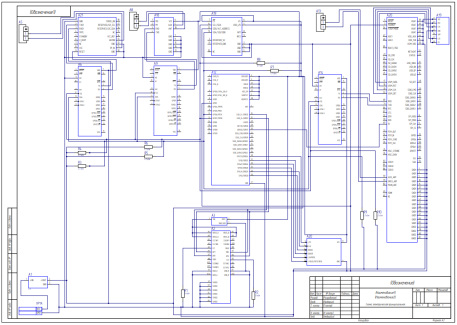
Рис. 2. Принципиальная электрическая схема устройства гибридного позиционирования
Питание схемы осуществляется от литий-ионного аккумулятора через DC/DC-преобразователь R-78B3.3–1.0 и линейный стабилизатор AMS1117–3.3 с выходным напряжением 3,3 В. Разъём USB Type-C обеспечивает заряд аккумулятора, программирование и сервисное подключение; резисторы 5,1 кОм в линиях CC1 и CC2 идентифицируют режим подключения по стандарту USB Power Delivery.
Центральным элементом схемы является микроконтроллер ESP32-C6, осуществляющий обработку навигационных данных, управление периферийными модулями, реализацию алгоритмов шифрования и управление режимами энергосбережения. Для согласования сигналов между микроконтроллером и модулями с интерфейсом UART применены три микросхемы-моста SC16IS750IPW, преобразующие UART в SPI/I²C и снижающие нагрузку на выводы микроконтроллера. Акселерометр ADXL345 подключён по шине I²C с подтягивающими резисторами 4,7 кОм; антенные разъёмы SMA обеспечивают подключение внешних антенн GNSS-, GSM- и LoRa-модулей.
Передача координат пользователю выполняется через бота интернет-мессенджера, при этом алгоритм шифрования применяется ко всем исходящим сообщениям. При отсутствии покрытия сети GSM устройство автоматически переключается на радиоканал LoRa, а при пропадании связи данные буферизуются в Flash-памяти W25Q128JVSIQ. Все выбранные компоненты соответствуют требованиям технического задания по диапазону рабочих температур (−40…+80 °С) и времени безотказной работы (5000 часов).
Заключение
В результате работы спроектировано портативное устройство гибридного позиционирования, объединяющее в едином компактном корпусе функции GNSS-навигации с точностью 1,5 м, передачи данных по сети 4G LTE и резервному радиоканалу LoRa дальностью до 10 км, контроля перемещения и вскрытия груза, шифрования сообщений и длительной автономной работы. Разработанные структурная и принципиальная электрическая схемы создают основу для последующего конструирования печатного узла и инженерного анализа устройства. По совокупности функциональных возможностей предложенное решение превосходит рассмотренные коммерческие аналоги и соответствует современным требованиям к интеллектуальным системам мониторинга грузов.
Литература:
- Сосулин Ю. Г. Теоретические основы радиолокации и радионавигации. — М.: Радио и связь, 2019. — 320 с.
- Соловьёв Ю. А. Спутниковая навигация и её приложения. — М.: Эко-Трендз, 2018. — 326 с.
- Quectel L76-M33 GNSS Module Hardware Design. — Quectel Wireless Solutions, 2021. — 48 p.
- SIM7600 Series Hardware Design V1.06. — SIMCom Wireless Solutions, 2020. — 112 p.
- E22–900T30S User Manual. — Chengdu Ebyte Electronic Technology Co., 2020. — 24 p.
- ADXL345 Digital Accelerometer Datasheet Rev. G. — Analog Devices, 2015. — 40 p.

