Currently, medical robotics is developing with phenomenal speed, just over a decade, doctors do not have to incise the patient's body, the replacement of this will come to a robot imitating a worm.
Keywords:Robot, surgery, robotic surgery.
Для проведения сложных операций на внутренних органах врачам-хирургам придет на помощь робот, имитирующий ползучего насекомого — червяка. Данный робот будут перемещаться в теле пациента и пока только исполнять менее ответственные операции, например, фотографировать труднодоступные места человеческого организма. Робот червяк будет состоять из нескольких модулей, проглоченных пациентом, которые будут состыковываться внутри организма, а после проведения всех необходимых операций распадаться и выводиться через естественные отверстия.

Рис. 1. Робот-червяк
Каждый модуль, из которых состоит «червяк» будет иметь свою специализацию: один вести съемку, другой обеспечивать питание, третий сбор анализов и т. д. Гибкость соединений позволит всей системе безболезненно двигаться сквозь кишечник, действуя в том месте, которое заинтересует врачей. Для организации гибкой и управляемой связи между капсулами «сегментного» робота можно использовать модули, которые также проходят через специальную модель желудка.
Таким образом для точного перемещения в организме человека, рассматривается манипулятор с перемещением в цилиндрической системе координат (Рис. 2). Поскольку перемещения по вертикальной оси мало влияют на динамику степени подвижности, в дальнейшем рассматриваются движения только в двух степенях свободы. Упругие элементы модулей передачи каждой степени подвижности представлены в виде линейной и вращательной пар с жесткостями соответственно К1 и К2. Объект манипулирования представлен точечной массой ML. Степени подвижности приводятся в движение с помощью электродвигателей, передающих силу и вращающий момент звеньям манипулятора через упругий модуль передачи.
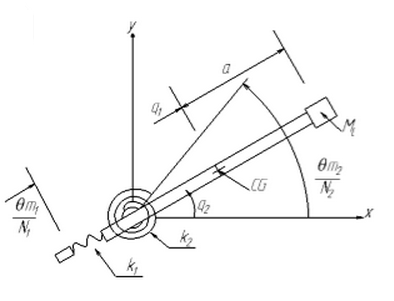
Рис. 2
На всех степенях подвижности необходимо установить электроприводы от высокомоментных электрических двигателей DD-типа с непосредственной безредукторной передачей. Таким образом, полная модель рассматриваемой плоской механической системы имеет четыре степени свободы и может быть представлена в виде
 ,(1)
,(1)
 ,(2)
,(2)
 , (3)
, (3)
 , (4)
, (4)
где
![]() ,
,
![]() .
.
![]() - положения валов двигателей;
- положения валов двигателей; ![]() — положения степеней подвижности на выходе модулей передачи;
— положения степеней подвижности на выходе модулей передачи; ![]() — передаточные отношения модулей передачи;
— передаточные отношения модулей передачи; ![]() — развиваемые двигателем моменты;
— развиваемые двигателем моменты; ![]() - константы вязкого трения двигателей;
- константы вязкого трения двигателей; ![]() — моменты инерции роторов двигателей;
— моменты инерции роторов двигателей; ![]() — масса звена;
— масса звена; ![]() — расстояние от центра тяжести звена до объекта манипулирования. Вводя в рассмотрение вектор
— расстояние от центра тяжести звена до объекта манипулирования. Вводя в рассмотрение вектор ![]() можно уравнения (1–4) представить в комплексной форме
можно уравнения (1–4) представить в комплексной форме
![]() , (5)
, (5)
где ![]() включает в себя нелинейные взаимосвязанные члены, представляющие кориолисовы и центробежные силы, а также силы тяжести и вязкого трения; член
включает в себя нелинейные взаимосвязанные члены, представляющие кориолисовы и центробежные силы, а также силы тяжести и вязкого трения; член ![]() представляет упругие силы в сочленениях.
представляет упругие силы в сочленениях.
Действуя внутри тела при помощи робота-червяка, хирурги могут избежать наружных надрезов, что позволяет снизить боль до минимума и сократить период восстановления пациента.
Литература:
- Поезжаева Е. В. Промышленные роботы: учебное пособие в 3 ч. — М.; УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009.
- http://trendclub.ru/883

